Un mini sous-marin imprimé en 3D pagaie sans électricité ni carburant
L’Université de sciences appliquées, ETH Zurich, est notamment connue pour ses multiples travaux de recherche en fabrication additive, que ce soit dans le domaine médical ou dans le développement de technologie d’impression. Plus récemment, elle s’est intéressée au secteur maritime, notamment au concept de propulsion pour sous marin. Une équipe de l’ETH a travaillé avec l’Institut de Technologie de Californie afin de mettre au point un nouveau concept de propulsion pour robots aquatiques. Ceux-ci exploiteraient les fluctuations de la température de l’eau pour créer une propulsion sans avoir besoin d’un moteur, d’un propulseur ou d’une alimentation électrique. L’impression 3D leur a permis de concevoir un premier prototype.
L’hélice de bateau imprimée par le RAMLAB (crédits photo: 3Dnatives / salon 3D PRINT)
Le secteur maritime voit se développer de nombreuses applications grâce à la fabrication additive, notamment pour concevoir des solutions plus performantes comme des hélices de bateaux ou encore des coques de voiliers plus solides. On peut même trouver des imprimantes 3D à bord de certains navires, permettant alors aux marins de créer des pièces de rechange facilement et rapidement, à l’image des astronautes qui impriment en 3D dans l’espace.
Un robot aquatique imprimé en 3D
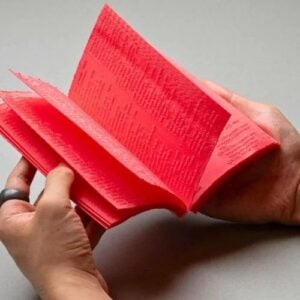
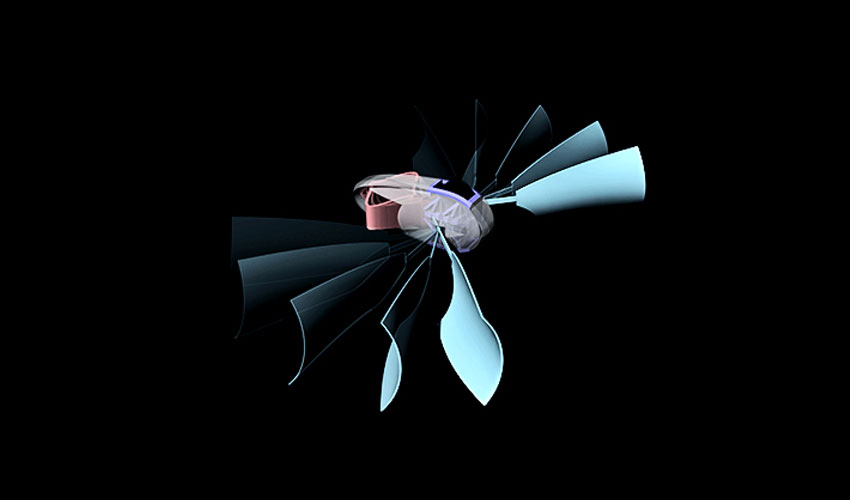
Les chercheurs de l’ETH Zurich ont créé un mini sous-marin de 7,5 centimètres équipé de pagaies, qu’ils auraient entièrement fabriqué à l’aide d’une imprimante 3D multi-matériaux. Ce petit sous-marin leur permet d’effectuer tous les tests nécessaires pour mieux comprendre le concept de propulsion développé. Les chercheurs expliquent : « Un des défis majeurs de la robotique est l’intégration de la détection, de l’actionnement, du contrôle et de la propulsion. Nous proposons une approche matérielle pour la conception de robots souples. Nous avons donc conçu un robot d’eau douce mobile, qui peut accomplir des tâches préprogrammées sans avoir besoin de l’électronique, des contrôleurs, ou des sources d’énergie à bord. »
Les pagaies fonctionneraient à l’aide d’un élément de propulsion bistable, que deux bandes de polymère à mémoire de forme activent. Conçues pour se dilater dans l’eau chaude, ces bandes de polymère alimentent le robot en agissant comme des muscles. Si l’eau dans laquelle flotte le mini-sous-marin est chauffée, l’expansion des muscles provoque un enclenchement rapide de l’élément bistable et donc un coup de pagaie. Le mouvement directionnel, la force et la synchronisation des coups de pagaie seraient définis avec précision par la géométrie et le matériau du robot.
Pour l’instant, chaque élément de propulsion ne peut réaliser qu’un seul coup de pagaie; les chercheurs doivent le reprogrammer manuellement. Toutefois, il serait possible de concevoir un robot avec plusieurs déclencheurs. L’équipe aurait également conclu que les bandes mince de polymères se réchauffent plus rapidement et réagiraient donc plus rapidement que les épaisses. Un des chercheurs de l’ETH Zurich, Kristina Shea, affirme : “La principale conclusion de notre travail est que nous avons développé un nouveau moyen de propulsion prometteur, entièrement imprimé en 3D, ajustable et fonctionnant sans source d’alimentation externe.”
Les chercheurs espèrent développer davantage le système de propulsion du sous-marin pour créer un navire de faible puissance permettant d’explorer les profondeurs océaniques. Retrouvez plus d’informations sur le site de l’ETH Zurich.
Que pensez-vous de ce mini sous-marin imprimé en 3D? Partagez également votre opinion dans les commentaires de l’article ou avec les membres du forum 3Dnatives.