





InMoov le robot humanoïde imprimé en 3D – Découverte avec son créateur !
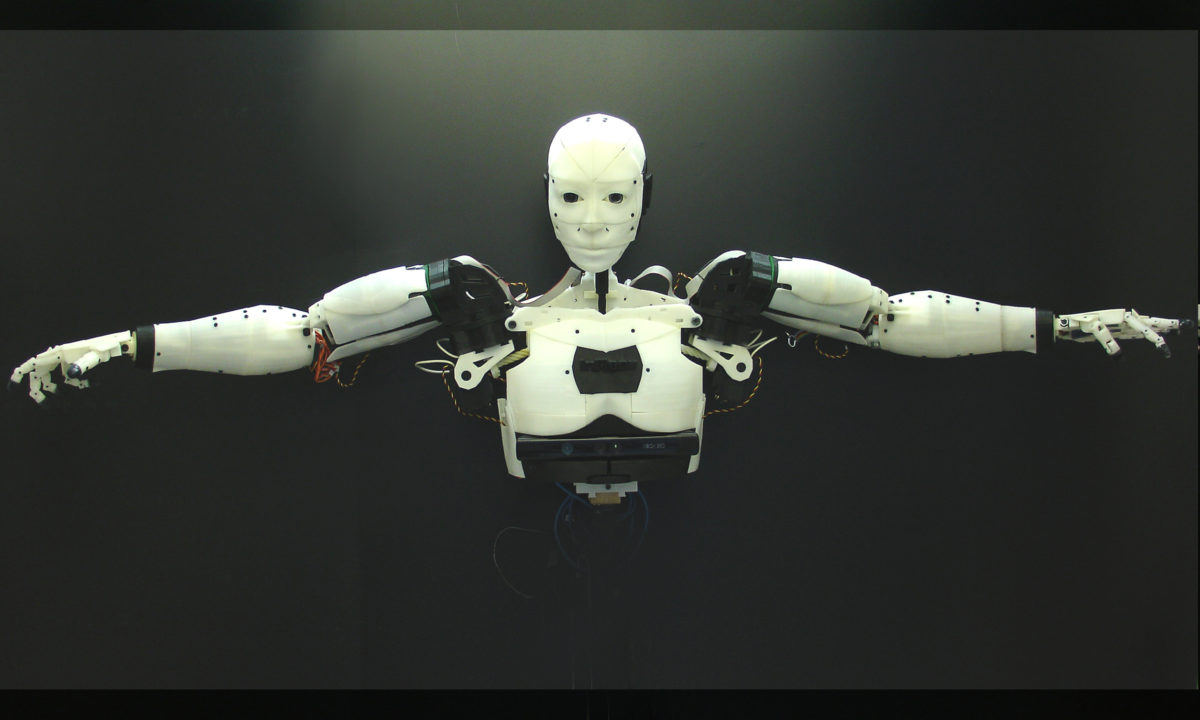
Il y a deux ans, le designer français Gaël Langevin a imaginé une prothèse futuriste. Aujourd’hui, son robot humanoïde est imprimé par des makers partout dans le monde. Son nom ? InMoov !
3Dnatives a eu le privilège de rencontrer le père du robot et un ingénieur Maker à l’autre bout de la planète qui utilise ce robot dans ses recherches.
3DN : Bonjour Gaël, pouvez vous nous dire qui vous êtes et ce que vous faites ?

Gaël Langevin
Je suis un sculpteur et designer français. Mon travail consiste à créer des objets pour les plus grandes marques avec toutes sortes de matières, le but étant de faire rêver et de faire appel à l’imaginaire. Je suis donc en permanence en quête d’idées et de solutions techniques et artistiques.
3DN : Qu’est-ce qui a été à l’origine du projet InMoov ?
En 2012 afin d’enrichir mon travail, j’ai fait l’acquisition d’une petite imprimante 3D. Une demande de devis pour la création d’une prothèse futuriste, mais qui n’a pas été concluante, m’a donné envie d’utiliser mon imprimante 3D pour la créer moi même. J’ai donc pendant mon temps libre modélisé et imprimé une main et un avant-bras. Ayant profité depuis plusieurs années de Linux et Blender, deux logiciel provenant du monde OpenSource, j’ai décidé de contribuer à ma manière à cette notion de partage disponible sur Internet, en mettant à disposition les fichiers de cette main sur Thingiverse.
L’enthousiasme de la communauté a été fulgurant, cela m’a donné envie de trouver des solutions pour motoriser et piloter cette main via mon ordinateur. C’est en cherchant un moyen OpenSource que j’ai découvert Arduino, une plateforme électronique supporté par une énorme et grandissante communauté de Makers, les bidouilleurs internationaux.
Une fois les solutions trouvées, j’ai à nouveau partagé toutes mes informations sur mon site InMoov.
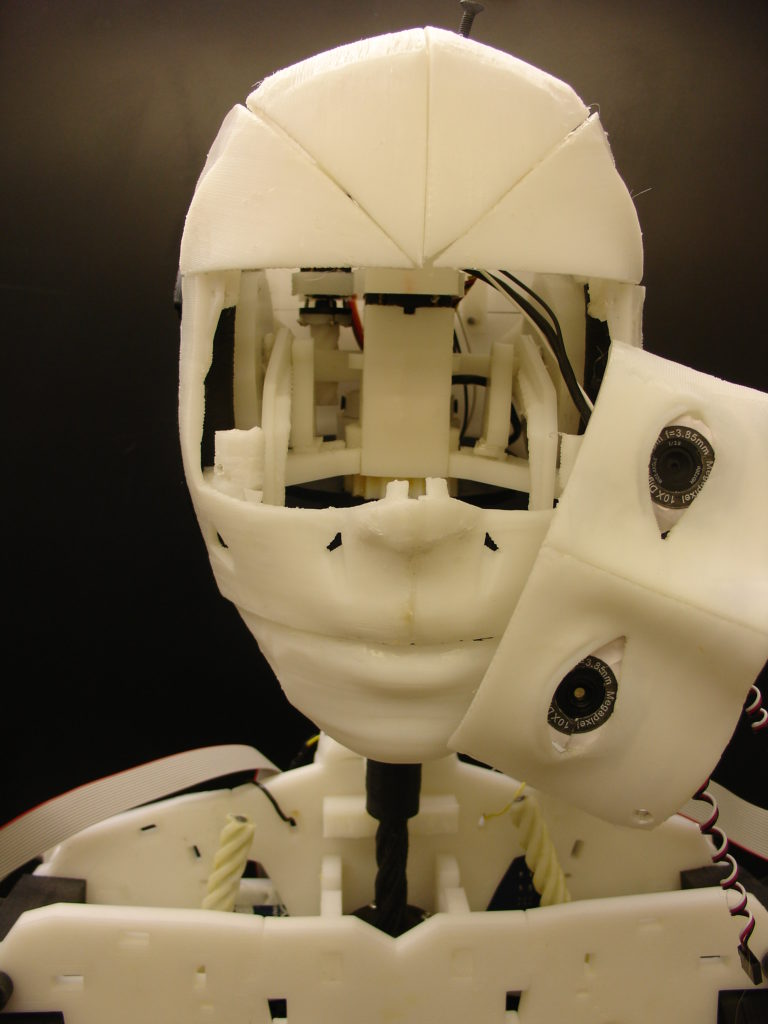
A partir de ce moment j’ai décidé d’avancer et de créer un robot humanoïde complet, disponible et reproductible par tous, et d’en faire une plateforme de développement pour les Makers, les écoles et les universités. Je conçois donc toutes les pièces dans un format de 12 cm3 afin que n’importe quelle petite imprimante puisse les reproduire.
3DN : Quelles ont été les différentes étapes de réalisation du robot InMoov ?

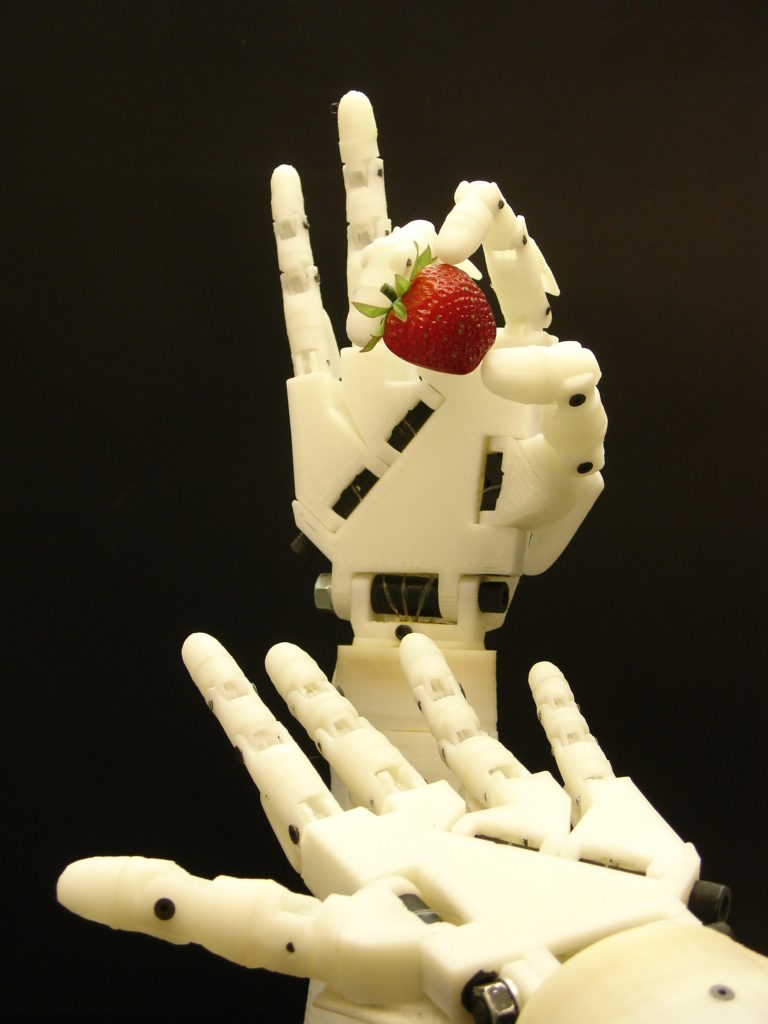
Main InMoov
Après la main j’ai créé un biceps puis une épaule. Cela a été relativement facile, une fois le bras droit créé sous Blender, j’ai fait une mirorisation (symétrie axiale) de ce bras afin d’obtenir et d’imprimer le bras gauche. J’avais ainsi deux bras fonctionnels que j’ai aussitôt partagé sur Internet.
Il me fallait trouver une solution pour synchroniser ces deux bras afin de poursuivre la création de mon robot. En cherchant pendant de longues heures sur Internet, la nuit, et oui c’est les seuls moments libres que je peux m’octroyer, je suis tombé sur MyRobotLab, un service Java OpenSource, grâce auquel j’ai rencontré Greg Perry, un personnage incroyable avec qui j’ai tout de suite accroché.
3DN : Quelles sont les prochaines étapes du projet ?
En ce moment, le défi consiste à créer les jambes du robot. Cette motivation est née, une fois de plus, grâce à la communauté qui m’invite toujours à aller plus loin.
Récemment, j’ai créé une autre main, qui sert aussi de prothèse, où tous les composants sont inclus de façon miniaturisée : les moteurs, une mini-carte Arduino, les drivers électroniques et la carte Advancer Technologies pour les capteurs sensoriels musculaires. Toujours dans l’esprit OpenSource et OpenAcces, presque toutes les pièces seront téléchargeables. Pourtant, j’envisage d’en imprimer deux qui seront en vente sur le site afin de financer la suite de mon projet. Cette nouvelle main va aider beaucoup de gens qui ont besoin d’une prothèse !
D’ailleurs, avec Greg Perry on envisage des applications et des améliorations intéressantes pour InMoov et la centaine de répliques qui existent déjà dans le monde. Etant tous branchés à la même base des données, la mise à jour des informations et des capacités du robot peut être directe et automatique pour tous les InMoov. On peut par exemple leur apprendre à reconnaître des nouveaux objets et les nommer et en faire profiter la communauté.
3DN : Parmi toutes les utilisations et applications qui ont été faites dans le monde, laquelle vous a le plus impressionnée ?
Très franchement, ce qui me fait le plus plaisir et m’impressionne, c’est que la main d’InMoov puisse finalement servir en tant que prothèse.
3DN : Un message pour nos lecteurs ?
J’aspire à une façon de vivre différente. Plus nous partagerons nos connaissances et nos cultures, et plus nous pourrons évoluer.
Voici une vidéo du robot InMoov contrôlé par voix et tracking visuel (en anglais):
La nouvelle prothèse de main InMoov:
[divider]
Le projet InMoov représente un grand impact international, non seulement pour les makers et les étudiants, mais également pour le monde de la recherche. Les chercheurs de l’université de Lincoln, en Angleterre, sont d’accord avec Haddadin* qui disait, en 2009, que l’interaction physique et la collaboration homme-robot était devenu un sujet d’importance croissante et un axe majeur dans la recherche. Ainsi, une réplique d’InMoov, appelée MARC (Multi-Actuated Robotic Companion), a été imprimée et assemblée pour être l’objet d’étude d’un projet de recherche sur l’interaction homme-machine, encadré par le docteur John Murray.
Le continent sud-américain est aussi concerné. Nous avons eu la chance de rencontrer l’ingénieur colombien Daniel Cuartas Quiceno qui a utilisé la main InMoov pour étudier des alternatives de robotisation et qui a utilisé une interface neuronale directe non invasive (EEG) pour le contrôle des mouvements.

Daniel Cuartas Quiceno
3DN : Bonjour Daniel, pouvez-vous présenter en quelques mots ?
Je suis Daniel Cuartas Quiceno, gagnant du TR35 Colombie et sélectionné comme l’innovateur colombien 2013 par le MIT Technology Review. Je suis un élève ingénieur en mécatronique, un maker, adepte de l’open source et un artiste visuel. Je suis passionné par la science et la technologie et par ses applications aux services de l’homme et la société.
3DN : En quoi consiste votre projet ?

Main InMoov contrôlée par une interface EEG. Présentation dans le Salon des Inventeurs 2013, Medellin-Colombie.
3DN : Quelle a été votre motivation pour sa réalisation?
6.4% de la population colombienne a un type d’handicap. Après avoir connu la portée des projets conçus autour de ce sujet, comme l’Eye Tracker ECU/EADL (projet développé en 2012), et leur impact mondial, mon équipe voulait en savoir plus sur les technologies qui peuvent servir de support pour le développement dédié à la mobilité réduite. Nous avons cherché une alternative de fabrication et nous avons donc testé l’impression 3D en ABS du modèle OpenSource InMoov. Ensuite, l’idée du contrôle neuronal est née en envisageant des nouvelles alternatives en robotique pour la conception des prothèses. Je voulais obtenir des mouvements plus naturels et silencieux en utilisant des procédés peu coûteux et personnalisables.
3DN : Un mot pour nos lecteurs?
Un grand merci Gaël et Daniel pour cette interview !
Un aperçu du robot InMoov:
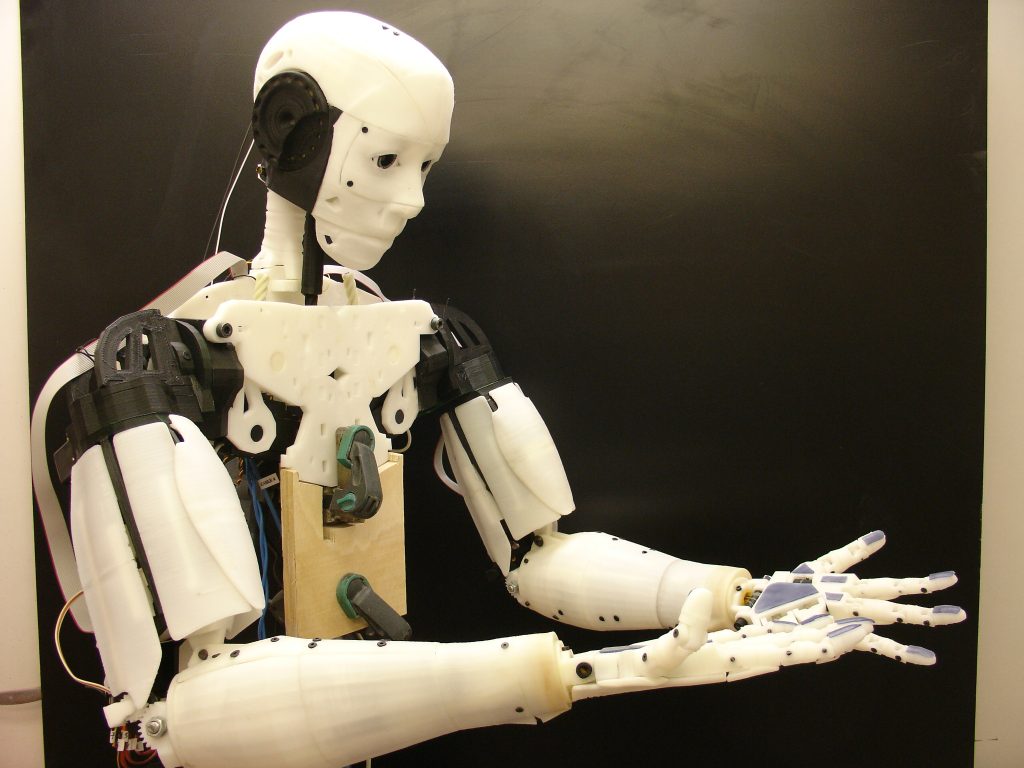
InMoov
* Haddadin, S. A.-S. (2009). Requirements for Safe Robots: Measurements, Analysis and New Insights. The International Journal of Robotics Research.
Pour rester informé abonnez vous à notre flux RSS ou pages Facebook et [follow id= »3Dnatives » ]









[…] Bionico Hand est une prothèse myoéléectrique imaginé dès 2012 par Nicolas Huchet pour un coût avoisinant les 300€. Le projet, qui a recours à plusieurs technologies open-source comme l’impression 3D ou les microcontrôleurs Arduino, a nécessité plus de 2 ans de développement avec l’aide du LabFab de Rennes et Gaël Langevin et son robot InMoov. […]