L’ETH Zurich démontre l’intérêt de combiner fabrication additive et robotique douce

Ces dernières années, nous assistons à un essor de la robotique douce : les robots fabriqués à partir de matériaux souples permettent en effet des déformations élastiques et minimisent les risques souvent à liés à l’utilisation de matériaux rigides comme l’acier ou l’aluminium. Les avantages de ce type de robotique sont recherchés dans un grand nombre de domaines tels que la santé, où les interactions homme-machine et la préhension d’objets fragiles ou complexes sont testées. Aujourd’hui, la robotique est de plus en plus touchée par la croissance de la fabrication additive : les deux technologies sont davantage combinées dans de nombreux secteurs pour concevoir des solutions plus performantes. Or, avec le développement rapide des matériaux compatibles en impression 3D, notamment le silicone par exemple, on assiste à une série de nouvelles applications dans la robotique. C’est le cas de celle présentée par le MIT et l’ETH Zurich qui ont développé un main robotique imprimée en 3D un peu particulière.
Les parties prenantes de ce projet ont réussi à transformer des plastiques à durcissement lent en impression 3D. Ces plastiques sont élastiques, plus durables et permettent à un robot portatif de les imprimer en un seul passage. Cette réussite a été rendue possible par la coopération avec la startup américaine Inkbit et sa technologie. Ils ont travaillé ensemble sur l’étude « Vision-controlled jetting for composite systems and robots » dans le but de produire des structures complexes à haute résolution avec différentes propriétés de matériaux et de recréer les fonctions d’organismes naturels sous une forme synthétique. Ils ont combiné l’impression 3D avec des scanners laser et un mécanisme de rétroaction. Cette approche a permis d’imprimer en 3D des polymères à faible viscosité et à durcissement lent, dotés d’une excellente élasticité. Il est ainsi possible de produire des matériaux complexes et résistants utilisés pour les robots, composés de différents matériaux de haute qualité et présentant une combinaison de structures élastiques et rigides. L’impression en continu de pièces filigranes et de structures à cavités semblables à celles d’un être humain ouvre également de nouvelles perspectives en matière de robotique souple. Les résultats de l’étude ont été publiés au début du mois dans la revue Nature.

The study shows new possibilities for soft robotics and 3D printing. (Image: Thomas Buchner et al; Nature)
Dans le cadre de l’étude, l’ETH Zurich et Inkbit ont testé leur approche dans divers exemples d’application. Ils ont produit une large gamme de composites à haute résolution et divers robots, notamment des mains robotisées, des pompes cardiaques et d’autres structures en métamatériaux. L’un des exemples les plus remarquables est une main robotisée dotée d’os et de ligaments artificiels. Elle est composée de différents polymères et comporte des cavités pour loger les capteurs. Elle a été imprimée en une seule fois et aucun autre assemblage n’a été nécessaire. Les polymères utilisés en sont l’une des raisons. « Nous n’aurions pas pu produire cette main avec les polyacrylates à polymérisation rapide que nous utilisions pour l’impression 3D, explique Thomas Buchner, doctorant dans le groupe de robotique de l’ETH et premier auteur de l’étude. Nous utilisons désormais des polymères thiolènes à polymérisation lente. Ils ont de très bonnes propriétés élastiques et reviennent à leur état d’origine beaucoup plus rapidement que les polyacrylates après avoir été pliés. » Ces propriétés font également des polymères thioléniques des matériaux idéaux pour produire les bandes élastiques de la main robotisée. En outre, la rigidité des thiols peut être ajustée très finement et donc adaptée aux exigences des robots souples. « Les robots en matériaux souples tels que la main que nous avons développée présentent des avantages par rapport aux robots conventionnels en métal : parce qu’ils sont souples, le risque de blessure est réduit lorsqu’ils travaillent avec des humains, et ils sont mieux adaptés à la manipulation de marchandises fragiles« , ajoute Robert Katzschmann, professeur à l’ETH.
Combiner impression 3D et robotique douce
L’approche adoptée par le MIT, l’ETH et Inkbit pour la main robotisée offre également un débit élevé et un processus d’impression multi-matériaux automatisé avec une grande évolutivité. Les polymères à durcissement lent susmentionnés (thiolènes et époxydes) ont joué un rôle clé dans la création de la main robotisée. Toutefois, la possibilité de les traiter par impression 3D dépend également de la technologie utilisée. Jusqu’à présent, seuls les polymères à durcissement rapide pouvaient être traités par impression 3D, car un dispositif racle les irrégularités après le durcissement et garantit ainsi des pièces de qualité appropriée. Toutefois, les polymères à durcissement lent risquent de bloquer un tel dispositif de raclage.
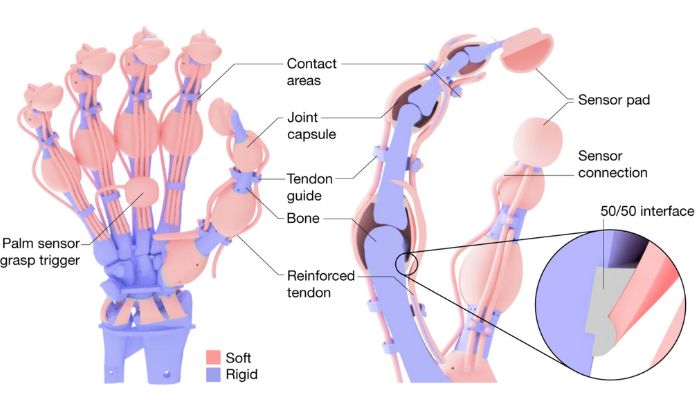
The 3D-printed robotic hand consists of artificial bones, tendons and ligaments made of different materials, including soft, elastic plastics. (Image: Thomas Buchner et al; Nature)
C’est l’avantage de la technologie Vision Controlled Jetting de la startup américaine Inkbit, issue du MIT. Avec cette technologie d’impression, un procédé à jet d’encre, des buses appliquent en chaque point le matériau visqueux souhaité, qui est durci couche par couche par une lampe UV. La particularité de cette technologie réside dans le fait qu’un scanner laser 3D vérifie ensuite les irrégularités de la couche imprimée, qui sont ensuite prises en compte lors de l’application de la couche suivante. « Un mécanisme de rétroaction compense ces irrégularités lors de l’impression de la couche suivante en calculant en temps réel les ajustements précis de la quantité de matériau à imprimer« , explique Wojciech Matusik, professeur au MIT et coauteur de l’étude. Cela signifie que le système de numérisation capture la structure 3D et permet une adaptation immédiate grâce à une boucle de rétroaction numérique. Cela élimine le besoin de solutions mécaniques supplémentaires et facilite un processus sans contact qui permet d’imprimer des plastiques à durcissement continu avec différentes élasticités. De la cire est utilisée comme support d’impression, qui est ensuite fondue à 60 degrés Celsius.
L’une des difficultés rencontrées par l’équipe dans le cadre de ce projet de recherche était que certaines pièces imprimées rencontraient un problème de warping. En outre, les couches des impressions multi-matériaux n’ont pas toujours bien adhéré, bien que cela puisse être amélioré à l’avenir. La haute résolution globale, le processus d’impression rapide et la large gamme de matériaux aux propriétés différentes peuvent déjà permettre une variété de robots hybrides, souples/rigides et d’autres applications. Le MIT et l’ETH Zurich ont pu optimiser la technologie d’impression d’Inkbit pour l’utilisation de polymères à durcissement lent en testant diverses applications. Ils vont maintenant se concentrer sur l’exploration d’autres possibilités et essayer d’imprimer et de tester des structures encore plus complexes. L’objectif final d’Inkbit est de développer et de commercialiser la technologie. Pour en savoir plus sur l’étude, cliquez ICI.
Que pensez-vous de l’utilisation de la fabrication additive en robotique douce ? Partagez votre avis dans les commentaires de l’article. Retrouvez toutes nos vidéos sur notre chaîne YouTube ou suivez-nous sur Facebook ou Twitter !
*Crédits photo de couverture : ETH Zürich, Thomas Buchner