Une main robotique imprimée en 3D qui identifie facilement les objets

Des chercheurs du Massachusetts Institute of Technology (MIT) ont créé une main robotique imprimée en 3D dotée de capteurs tactiles capable d’identifier un objet dès la première fois qu’elle l’attrape. Il s’agit d’une technologie qui se développe dans le secteur médical, notamment en raison du vieillissement de la population qui touche de nombreux pays : les mains robotiques pourraient particulièrement servir dans les hôpitaux.
Ce n’est donc pas le premier projet de développement de mains robotiques mais jusqu’ici, celles-ci n’étaient pas capables d’identifier les objets de manière fiable. En cause, le fait que, pour la plupart des mains robotiques, les capteurs soient uniquement situés au bout des doigts, ce qui engendre la nécessité d’attraper l’objet plusieurs fois. Sur d’autres mains robotiques, les capteurs sont bien intégrés sur toute la longueur du doigt artificiel mais ils sont moins puissants, et collectent donc une quantité d’information moindre, entraînant également des difficultés en matière de reconnaissance des objets.
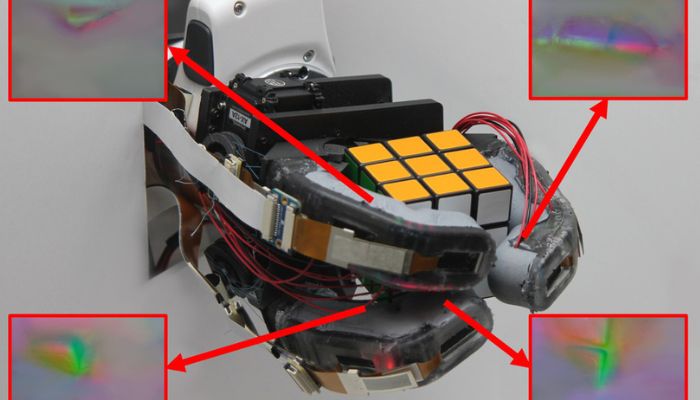
La main robotique est équipée de plusieurs capteurs puissants (crédits photo : MIT)
Le prototype créé par les chercheurs du MIT répond à cette problématique. Celui-ci arbore trois doigts, constitués d’un squelette robuste imprimé en 3D, capable d’attraper même des objets lourds. Lors de leurs expérimentations, il est apparu que la meilleure configuration consistait à placer deux doigts qui forment un Y et un troisième qui constitue un pouce opposable, ce qui permet une meilleure prise. Ce squelette est entouré par une couche molle, flexible, qui permet de ne pas endommager les objets fragiles en les attrapant. Cette couche dispose de capteurs haute résolution, qui recueillent une grande quantité de données visuelles tout au long des doigts au moyen d’un appareil photo et de LED.
Sandra Liu, étudiante au sein du département d’ingénierie mécanique et co-autrice de l’article de recherche sur le doigt robotique, explique l’importance de disposer d’une main qui soit à la fois solide et souple : “Il est capital d’utiliser à la fois des éléments souples et rigides pour concevoir une main, mais il est également essentiel de lui attribuer une grande sensibilité sur une vaste surface, surtout si l’on souhaite qu’elle puisse prendre en charge des tâches de manipulation très complexes similaires à celles que réalisent nos propres mains. Pour ce prototype, notre objectif était de combiner tous les éléments qui rendent nos mains humaines efficaces afin de créer un doigt robotique capable de réaliser des tâches que les autres robots ne peuvent pas effectuer à l’heure actuelle”. L’article a été écrit par Sandra Liu et son camarade Leonardo Zamora Yañez, sous la direction d’Edward Adelson. Ils espèrent parvenir à améliorer leur robot de manière à en réduire l’usure et à permettre au pouce de réaliser des tâches plus variées. Consultez le communiqué du MIT pour obtenir davantage d’informations sur le projet.
Que pensez-vous de cette main robotique ? Partagez votre avis dans les commentaires de l’article. Retrouvez toutes nos vidéos sur notre chaîne YouTube ou suivez-nous sur Facebook ou Twitter !
* Crédit photo de couverture : Robofunction Systems