Il MIT e l’ETH di Zurigo realizzano una mano robotica stampata in 3D

Negli ultimi anni abbiamo assistito a un boom della robotica morbida per i vantaggi ad essa associata. I robot realizzati con materiali flessibili consentono, ad esempio, deformazioni elastiche e minimizzano i rischi spesso associati all’uso di materiali rigidi come l’acciaio o l’alluminio. I vantaggi di questo tipo di robotica sono ricercati in una vasta gamma di settori, tra cui spicca quello medicale, dove si sperimenta l’interazione uomo-macchina e la presa di oggetti fragili o complessi. Oggi la robotica è sempre più influenzata dalla crescita della produzione additiva: le due tecnologie vengono combinate in molte applicazioni per progettare soluzioni più efficaci. Con il rapido sviluppo di materiali compatibili con la stampa 3D, come il silicone, stiamo assistendo a una serie di nuove invenzioni nella robotica. È il caso della mano robotica stampata in 3D presentata dal MIT e dal Politecnico di Zurigo (ETH).
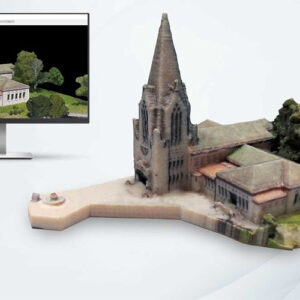
Questo progetto è stato reso possibile dalla collaborazione con la start-up americana Inkbit e la sua tecnologia. Hanno lavorato insieme allo studio “Vision-controlled jetting for composite systems and robots”, con l’obiettivo di produrre strutture complesse ad alta risoluzione con diverse proprietà dei materiali e ricreare le funzioni degli organismi naturali in forma sintetica. Hanno combinato la stampa 3D con scanner laser e un meccanismo di feedback, il che ha permesso di stampare in 3D polimeri a bassa viscosità e lento indurimento con un’eccellente elasticità. Di conseguenza, è stato possibile utilizzare materiali complessi e resistenti, composti da diversi materiali di alta qualità e caratterizzati da una combinazione di strutture elastiche e rigide. I risultati dello studio sono stati pubblicati all’inizio del mese sulla rivista Nature.

Lo studio mostra nuove possibilità per la robotica morbida e la stampa 3D. (Immagine: Thomas Buchner et al.; Nature)
Nell’ambito dello studio, il Politecnico di Zurigo e Inkbit hanno testato il loro approccio in vari esempi di applicazione. Hanno prodotto un’ampia gamma di compositi ad alta risoluzione e vari robot, tra cui mani robotiche, pompe cardiache e altre strutture con metamateriali. Uno degli esempi più notevoli è una mano robotica con ossa e legamenti artificiali. Questa è stata realizzata con diversi polimeri e con delle cavità per ospitare dei sensori, ed è stata stampata in un’unica operazione. I polimeri utilizzati sono una delle ragioni di questo risultato. “Non saremmo stati in grado di produrre questa mano con i poliacrilati a polimerizzazione rapida per la stampa 3D“, spiega Thomas Buchner, dottorando del gruppo di robotica dell’ETH e primo autore dello studio. E continua: “Ora stiamo usando polimeri tiolenici a polimerizzazione lenta. Hanno ottime proprietà elastiche e tornano al loro stato originale molto più rapidamente dei poliacrilati dopo essere stati piegati“.
Queste proprietà hanno reso i polimeri tiolenici materiali ideali per la produzione di bande elastiche per la mano robotica. Inoltre, la rigidità dei tioli può essere regolata con precisione per soddisfare i requisiti dei robot flessibili. “I robot realizzati con materiali flessibili, come la mano che abbiamo sviluppato, presentano dei vantaggi rispetto ai robot metallici convenzionali: grazie alla loro flessibilità, il rischio di lesioni è ridotto quando si lavora con gli esseri umani e sono più adatti a maneggiare oggetti fragili“, aggiunge Robert Katzschmann, professore dell’ETH.
Combinazione di stampa 3D e robotica morbida
L’approccio adottato da MIT, ETH e Inkbit per la mano robotica si caratterizza anche per l’elevata produttività e il processo di stampa multi-materiale automatizzato con un’alta scalabilità. I polimeri a lenta polimerizzazione menzionati in precedenza (tioleni ed epossidici) hanno svolto un ruolo fondamentale nella creazione della mano robotica. Tuttavia, la possibilità di lavorarli con la stampa 3D dipende anche dalla tecnologia utilizzata. Finora, solo i polimeri a rapido indurimento potevano essere lavorati con la stampa 3D, in quanto esistono dispositivi per eliminare le irregolarità dopo la solidificazione del materiale, garantendo così parti di qualità. I polimeri a lento indurimento rischiano invece di bloccare tale dispositivo.
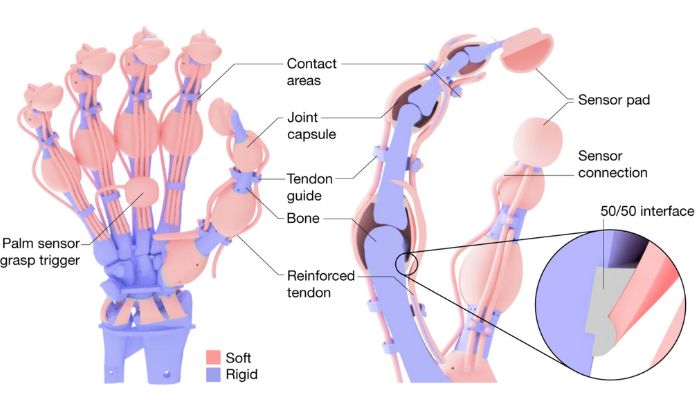
La mano robotica stampata in 3D è composta da ossa, tendini e legamenti artificiali realizzati con materiali diversi, tra cui plastiche morbide ed elastiche. (Immagine: Thomas Buchner et al; Nature)
Questo è il vantaggio della tecnologia Vision Controlled Jetting sviluppata dalla start-up americana Inkbit, spin-off del MIT. Con questa tecnologia di stampa, un processo di Material Jetting, gli ugelli applicano il materiale viscoso desiderato in ogni punto, che viene poi polimerizzato strato per strato da una lampada UV. La particolarità di questa tecnologia è che uno scanner laser 3D controlla le irregolarità dello strato stampato, che vengono prese in considerazione quando viene applicato lo strato successivo. “Un meccanismo di feedback compensa queste irregolarità durante la stampa dello strato successivo, calcolando in tempo reale le regolazioni precise della quantità di materiale da erogare“, spiega Wojciech Matusz. spiega Wojciech Matusik, professore al MIT e coautore dello studio. Ciò significa che il sistema di scansione cattura la struttura 3D e consente un adattamento immediato grazie a un ciclo di feedback digitale. Questo elimina la necessità di soluzioni meccaniche aggiuntive e facilita un processo senza contatto che consente di stampare plastiche a indurimento continuo con diverse elasticità. Come mezzo di stampa viene utilizzata la cera, che viene poi fusa a 60 gradi Celsius.
Una delle difficoltà incontrate dal team nell’ambito di questo progetto di ricerca è stato il warping di alcune parti stampate. Inoltre, gli strati delle stampe multimateriale non sempre aderivano bene, anche se questo aspetto potrebbe essere migliorato in futuro. L’elevata risoluzione complessiva, la rapidità del processo di stampa e l’ampia gamma di materiali con proprietà diverse possono già consentire una varietà di robot ibridi, flessibili e rigidi e altre applicazioni. Il MIT e il Politecnico di Zurigo sono riusciti a ottimizzare la tecnologia di stampa di Inkbit per l’uso di polimeri a lenta polimerizzazione, testando varie applicazioni. Ora si concentreranno sull’esplorazione di altre possibilità, cercando di stampare e testare strutture ancora più complesse. L’obiettivo finale di Inkbit è sviluppare e commercializzare la tecnologia. Per maggiori informazioni, rimandiamo allo studio completo: QUI.
Cosa ne pensi della mano robotica stampata in 3D e del lavoro di ricerca tra il MIT e il Politecnico di Zurigo? Faccelo sapere lasciando un commento sui nostri canali social Facebook, Linkedin e YouTube! Non dimenticare di iscriverti alla nostra Newsletter per ricevere tutte le notizie dall’evento direttamente nella tua casella di posta!
*Crediti fotografici di copertina: ETH Zürich, Thomas Buchner