ETH Zurich demuestra las ventajas de combinar la fabricación aditiva y la robótica blanda

En los últimos años hemos asistido a un auge de la robótica blanda. Se tratan de robots fabricados con materiales flexibles que permiten deformaciones elásticas y minimizan los riesgos que conllevan el uso de materiales rígidos como el acero o el aluminio. Las ventajas de este tipo de robótica se aprovechan en campos muy diversos, como la salud, donde se ensaya la interacción hombre-máquina y el agarre de objetos frágiles o complejos. Hoy en día, la robótica blanda se ve cada vez más afectada por el crecimiento de la fabricación aditiva. Ambas tecnologías se combinan cada vez más en muchos sectores para diseñar soluciones más eficaces. Con el rápido desarrollo de materiales compatibles con la impresión 3D, como la silicona, estamos asistiendo a una serie de nuevas aplicaciones en robótica. Este es el caso de la presentada por el MIT y ETH Zurich, que han desarrollado una mano robótica impresa en 3D bastante inusual.
Las partes implicadas en este proyecto han logrado transformar plásticos de endurecimiento lento en impresión 3D. Estos plásticos son elásticos, más duraderos y permiten que un robot portátil los imprima de una sola pasada. Este éxito ha sido posible gracias a la cooperación con la startup estadounidense Inkbit y su tecnología. Trabajaron juntos en el estudio “Vision-controlled jetting for composite systems and robots”, con el objetivo de producir estructuras complejas de alta resolución con distintas propiedades materiales, y recrear las funciones de los organismos naturales de forma sintética. Combinaron la impresión 3D con escáneres láser y un mecanismo de retroalimentación. Este método ha permitido fabricar con polímeros de baja viscosidad y endurecimiento lento con una excelente elasticidad. Como resultado, es posible producir materiales complejos y resistentes para robots, compuestos de distintos materiales de alta calidad y con una combinación de estructuras elásticas y rígidas. La impresión continua de piezas filigranadas y estructuras con cavidades similares a las de un ser humano también abre nuevas perspectivas para la robótica blanda. Los resultados del estudio se publicaron a principios de este mes en la revista Nature.

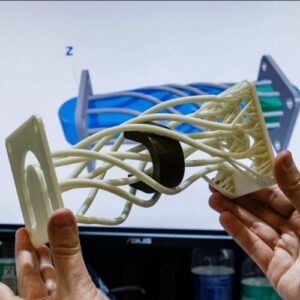
El estudio muestra nuevas posibilidades para la robótica blanda y la fabricación aditiva. (Créditos: Thomas Buchner et al; Nature)
Como parte del estudio, la ETH de Zúrich e Inkbit probaron su método en varias aplicaciones. Produjeron una amplia gama de compuestos de alta resolución y varios robots, incluidas manos robóticas, bombas cardíacas y otras estructuras de metamateriales. Uno de los ejemplos más notables es una mano robótica con huesos y ligamentos artificiales. Está hecha de distintos polímeros y tiene cavidades para alojar sensores. Se imprimió en un solo proceso y no fue necesario ensamblarla a posteriori. Los polímeros utilizados son una de las razones.
“No habríamos podido fabricar esta mano con los poliacrilatos de polimerización rápida que utilizamos para la impresión 3D”, explica Thomas Buchner, estudiante de doctorado del grupo de robótica de la ETH y primer autor del estudio. “Ahora utilizamos polímeros de tioleno de polimerización lenta. Tienen muy buenas propiedades elásticas y vuelven a su estado original mucho más rápido que los poliacrilatos después de ser doblados”.
Estas propiedades también convierten a los polímeros de tioleno en materiales ideales para fabricar las bandas elásticas de la mano robótica. Además, la rigidez de los tioles puede ajustarse con precisión a los requisitos de los robots blandos. “Los robots fabricados con materiales flexibles, como la mano que hemos desarrollado, tienen ventajas sobre los robots metálicos convencionales. Al ser flexibles, se reduce el riesgo de lesiones y son más adecuados para manipular mercancías frágiles”, añade Robert Katzschmann, catedrático de la ETH.
Combinando la impresión 3D y la robótica
El enfoque adoptado por el MIT, la ETH e Inkbit para la mano robótica también ofrece un alto rendimiento y un proceso de impresión multimaterial automatizado con gran escalabilidad. Los polímeros de curado lento antes mencionados (tiolenos y epoxis) desempeñaron un papel fundamental en la creación de la mano robótica. Además, que puedan procesarse mediante impresión 3D también depende de la tecnología utilizada. Hasta ahora, sólo los polímeros de curado rápido podían procesarse mediante impresión 3D, ya que un dispositivo rasparía cualquier irregularidad tras el curado, garantizando así piezas de la calidad adecuada. Sin embargo, los polímeros de curado lento harían que un rascador de este tipo se atascara, por lo que merece la pena examinar más de cerca la tecnología empleada por la ETH de Zúrich en su investigación.
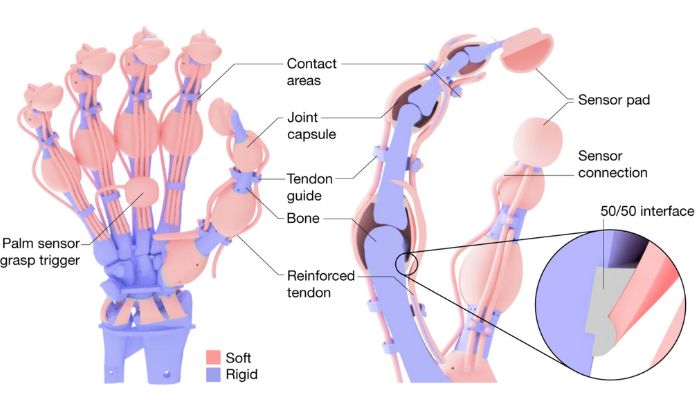
La mano robótica impresa en 3D consta de huesos, tendones y ligamentos artificiales, hechos de distintos materiales, incluidos plásticos blandos y elásticos (Créditos: Thomas Buchner et al; Nature)
Esta es la ventaja de la tecnología Vision Controlled Jetting desarrollada por la start-up estadounidense Inkbit, una spin-off del MIT. Con esta tecnología de impresión, un proceso de inyección de tinta, unas boquillas aplican el material viscoso deseado en cada punto, que luego se cura capa a capa mediante una luz UV. La particularidad de esta tecnología es que un escáner 3D láser comprueba si hay irregularidades en la capa impresa, lo cual se tienen en cuenta al aplicar la siguiente capa.
“Un mecanismo de retroalimentación compensa estas irregularidades al imprimir la siguiente capa calculando en tiempo real los ajustes precisos de la cantidad de material que se va a imprimir”, explica Wojciech Matusik, profesor del MIT y coautor del estudio. Esto significa que el sistema de escaneado capta la estructura 3D y permite una adaptación inmediata gracias a un bucle de retroalimentación digital. Esto elimina la necesidad de soluciones mecánicas adicionales y facilita un proceso sin contacto que permite imprimir plásticos de endurecimiento continuo con diferentes elasticidades. Como soporte de impresión se utiliza cera, que se funde a 60 grados centígrados.
Una de las dificultades a las que se enfrentó el equipo en el marco de este proyecto de investigación fue que algunas de las piezas impresas sufrían el efecto warping. Además, las capas de las impresiones multimaterial no siempre se adherían bien, aunque esto podría mejorarse en el futuro. La alta resolución global, la rapidez del proceso de impresión y la amplia gama de materiales con distintas propiedades pueden permitir ya una gran variedad de robots híbridos, flexibles/rígidos y otras aplicaciones. El MIT y la ETH de Zúrich han podido optimizar la tecnología de impresión de Inkbit para el uso de polímeros de curado lento probando diversas aplicaciones. Ahora se concentrarán en explorar otras posibilidades e intentar imprimir y probar estructuras aún más complejas. El objetivo de Inkbit es desarrollar y comercializar la tecnología. Puedes encontrar más información sobre el estudio aquí.
¿Qué piensas de combinar la fabricación aditiva y la robótica blanda? Deja tus comentarios en nuestras redes sociales: Facebook, Twitter y Youtube. Sigue toda la información sobre impresión 3D en nuestra Newsletter semanal.
*Créditos foto de portada: ETH Zürich, Thomas Buchner