3D printed soft robots can fold like origami

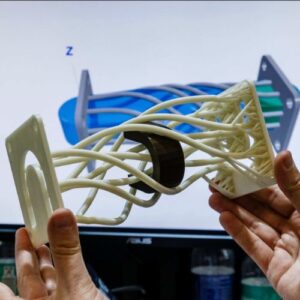
Soft robotics is one of the subfields of robotics dealing with constructing robots from highly compliant materials, similar to those found in living organisms. This field looks at the way in which living organisms move and adapt to their surroundings in order for robots to do the same. The majority of soft robots today rely on external power and control which limits their applications. Researchers from Harvard University and the California Institute of Technology have created origami-inspired soft-robotic systems, using additive manufacturing. These 3D printed soft robots can move and change shape by responding to external stimuli without relying on external power or control.
What is the role of 3D printing technologies in this field?
Jennifer A. Lewis, the Hansjorg Wyss Professor of Biologically Inspired Engineering at SEAS and co-lead author of the study, explains: “The ability to integrate active materials within 3D printed objects enables the design and fabrication of entirely new classes of soft robotic matter.” The researchers found that turning to origami allowed them to create multifunctional soft robots.
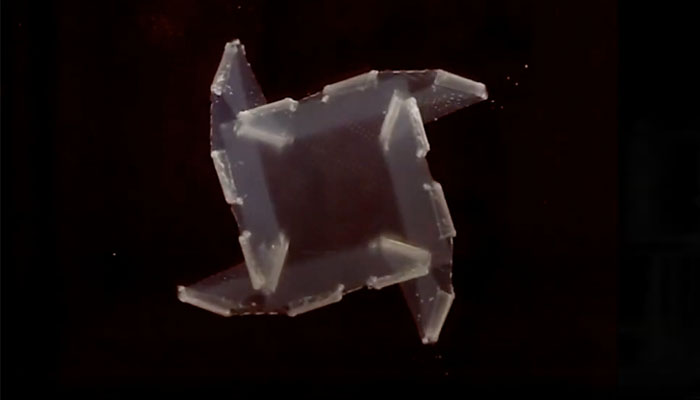
The 3D printed soft robot is folding
Under the same single structure, origami can create multiple shapes and functionalities. The materials used were liquid crystal elastomers that change shape when exposed to heat. By 3D printing two types of liquid crystal elastomers that respond to different temperatures, the researchers were able to program the structure to fold in a specific order. “Using hinges makes it easier to program robotic functions and control how a robot will change shape. Instead of having the entire body of a soft robot deform in ways that can be difficult to predict, you only need to program how a few small regions of your structure will respond to changes in temperature,” said Connor McMahan, a graduate student at Caltech and co-first author of the paper.
In order to showcase the findings of their research, the scientists created a soft-robot, named Rollbot. The Rollbot begins as a flat sheet, about 8 centimeters long and 4 centimeters wide. When placed on a hot surface, about 200°C, one set of hinges folds and the robot curls into a pentagonal wheel as you will be able to see in the video below:
“These untethered structures can be passively controlled. In other words, all we need to do is expose the structures to specific temperature environments and they will respond according to how we programmed the hinges” explained Kotikan, another author of the paper. And whilst, in this particular paper, the researchers focused on temperature response, apparently, these soft-robots can also respond to light, pH, humidity and other external stimuli – opening up a wide range of other applications.
Finally, Chiara Daraio, Professor of Mechanical Engineering and Applied Physics at Caltech and co-lead author of the study concluded: “In the future, such materials can be programmed to perform ever more complex tasks, blurring the boundaries between materials and robot.” You can find more information HERE.
What do you think of these 3D printed soft robots? Let us know in a comment below or on our Facebook and Twitter pages if the listing above was useful! Don’t forget to sign up for our free weekly Newsletter, with all the latest news in 3D printing delivered straight to your inbox!