3D Printed Robotic Hand Can Identify Objects With One Grip

Researchers from the Massachusetts Institute of Technology (MIT) have created a 3D-printed robotic hand with touch sensors that can determine the identity of an object with just one grasp. This technology is becoming increasingly important, especially with the aging population crisis many countries are facing, as robotic hands could be particularly valuable in nursing care in the future. Up until now, there have been many different projects centered on developing robotic hands, but the problem with many of them is that they have not yet been able to identify objects reliably. This is because the sensors in most robotic hands are only located at the fingertips, meaning that the object must be grasped repeatedly. Or in another case, they could have less powerful sensors which are integrated throughout the artificial finger but collect less information, necessitating multiple grasping attempts.
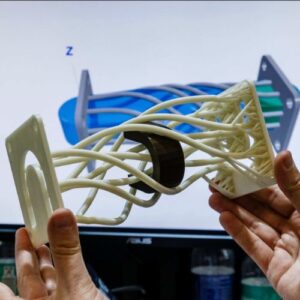
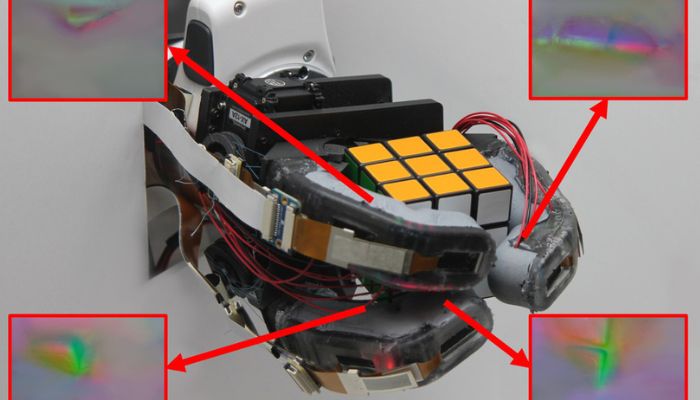
Now, the MIT researchers have successfully developed a new prototype that could fix these issues. It has three fingers featuring a robust 3D-printed skeleton, which is capable of gripping even heavy objects. When perfecting the design, they found that the best set-up involved having two fingers arranged in a Y pattern with a third finger as an opposing thumb, allowing for a better grasp. The skeleton is surrounded by a flexible, soft layer necessary for carefully gripping pliable objects. This layer includes high-resolution sensors, creating transparent skin. The sensors collect a wide range of visual data across the entire finger length using a camera and LEDs.
The robotic hand is equipped with several powerful sensors (Photo credit: MIT)
Sandra Liu, a student in the Department of Mechanical Engineering and co-author of the research paper on the robotic finger, explains the importance of having a hand that is both strong and soft,: “Having both soft and rigid elements is very important in any hand, but so is being able to perform great sensing over a really large area, especially if we want to consider doing very complicated manipulation tasks like what our own hands can do. Our goal with this work was to combine all the things that make our human hands so good into a robotic finger that can do tasks other robotic fingers can’t currently do.” The research paper was authored by Liu and fellow student Leonardo Zamora Yañez under the guidance of their advisor, Edward Adelson. Over time, they hope to improve the hardware in order to reduce the war and tear as well as allow the thumb to perform a wider variety of tasks. More information about the project can be found HERE.
What do you think of this 3D printed robotic hand? Let us know in a comment below or on our LinkedIn, Facebook, and Twitter pages! Don’t forget to sign up for our free weekly Newsletter here, the latest 3D printing news straight to your inbox! You can also find all our videos on our YouTube channel.
*Cover photo credit: Robofunction Systems