ETH Zürich zeigt mit 3D-gedruckter Roboter-Hand neue Potentiale für die Softrobotik auf

Die Robotik wächst mit den wachsenden Anwendungsbereichen und Erfordernissen. Insbesondere die Softrobotik ist auf dem Vormarsch, denn Roboter aus weichen Materialien ermöglichen elastische Verformungen und minimieren Gefahren, die oft bei herkömmlichen Robotern aus steifen Materialien wie Stahl oder Aluminium bestehen. Die Vorteile der Softrobotik sind in den verschiedensten Feldern gefragt, wie etwa Gesundheitsfürsorge, Mensch-Maschine-Interaktionen und dem Greifen von zerbrechlichen oder komplexen Objekten. Wachstum, getrieben durch neue Anwendungen, ist auch ein Parameter, der auf die Entwicklung des 3D-Drucks zutrifft. Robotik und additiven Fertigung teilen sich diese Gemeinsamkeit und so ist es kein Wunder, dass Technologien fusionieren und Roboter immer häufiger per 3D-Druck gefertigt werden. Bisher war die additive Fertigung darauf beschränkt, nur schnell härtende Kunststoffe zu verarbeiten. Ein fortschrittliches, erweitertes Portfolio an kompatiblen Materialien bringt aber auch hier neue Entwicklungen und folglich neue Anwendungspotentiale. In diesem Zusammenhang lässt eine Studie der ETH Zürich aufhorchen, bei der einer 3D-gedruckten Roboter-Hand eine besondere Rolle zuteil wird.
Forschern der Eidgenössischen Technischen Hochschule Zürich (ETH Zürich) ist es gelungen, erstmals langsam härtende Kunststoffe im 3D-Druck zu verarbeiten. Diese Kunststoffe sind elastisch, dauerhafter und robuster und ermöglichten den Druck eines Hand-Roboters in einem Durchgang. Möglich machte dies die Kooperation mit dem US-Startup Inkbit und dessen Technologie. Zusammen arbeiteten sie an der Studie „Vision-controlled jetting for composite systems and robots“ mit dem Ziel, komplexe Strukturen mit hohen Auflösungen und unterschiedlichen Materialeigenschaften herzustellen und die Funktionen von natürlichen Organismen in synthetischer Form nachzustellen. Damit reagierten die Kooperationspartner auf die Herausforderung, komplexe, funktionale Systeme mit elastischen Eigenschaften automatisch und schnell mit herkömmlichen Herstellungsverfahren zu fertigen. Sie kombinierten 3D-Druck mit Laserscannern und einem Feedback-Mechanismus. Aufgrund dieses technologischen Ansatzes war es möglich, erstmals niedrigviskose, langsam härtende Polymere mit hervorragender Elastizität 3D zu drucken. Auf diese Weise können nun komplexe, widerstandsfähige Roboter hergestellt werden, welche aus verschiedenen, qualitativ hochwertigen Materialien bestehen und eine Kombination aus weichen, elastischen und harten, festen Strukturen aufweisen. Der gelungene durchgängige Druck von filigranen Teilen und menschenähnlichen Strukturen mit Hohlräumen zeigt so auch neue Möglichkeiten in der Softrobotik auf. Die Ergebnisse der Studie wurden am 15.11.2023 im Fachmagazin Nature veröffentlicht.

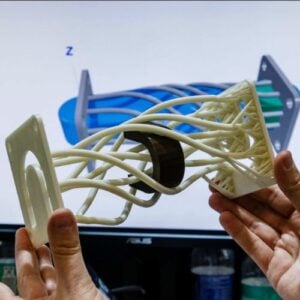
Die Studie der ETH Zürich mit Inkbit zeigt neue Möglichkeiten für die Softrobotik und den 3D-Druck auf. (Bild: Thomas Buchner et al; Nature)
Im Rahmen der Studie testeten die ETH Zürich und Inkbit ihren Ansatz in verschiedenen Anwendungsbeispielen. So stellten sie eine breite Palette an hochauflösenden Verbundstoffen und verschiedenen Robotern her, darunter Roboter-Hände, pneumatisch betätigte Laufmanipulatoren, Herzpumpen und weitere Metamaterialstrukturen. Das Beispiel der Roboter-Hand mit künstlichen Knochen, Bändern und Sehen sticht dabei besonders hervor, denn die Hand besteht aus verschiedenen Polymeren und weist für die Sensorik auch Hohlräume auf. Der Druck erfolgte in einem Rutsch und es war kein weiteres Zusammenbauen erforderlich. Grund dafür waren unter anderem die verwendeten Polymere: „Mit den schnell härtenden Polyacrylaten, die wir bisher beim 3D-Druck verwendeten, hätten wir diese Hand nicht herstellen können“, erklärt Thomas Buchner, Doktorand in der Gruppe von ETH-Robotik-Professor Robert Katzschmann und Erstautor der Studie. „Wir verwenden neu langsam härtende Thiolen-Polymere. Diese haben sehr gute elastische Eigenschaften und springen nach dem Verbiegen viel schneller in den Ausgangszustand zurück als Polyacrylate.“ Aufgrund dieser Eigenschaften eigneten sich die Thiolen-Polymere auch hervorragend dazu, die elastischen Bänder der Roboter-Hand herzustellen. Außerdem kann die Steifigkeit von Thiolen sehr fein eingestellt werden und so an die Erfordernisse von Softrobotern angepasst werden. „Roboter aus weichen Materialien wie die von uns entwickelte Hand haben Vorteile gegenüber herkömmlichen Robotern aus Metall: Weil sie weich sind, sinkt die Verletzungsgefahr, wenn sie mit Menschen zusammenarbeiten, und sie eignen sich besser für den Umgang mit zerbrechlichen Gütern“, erklärt ETH-Professor Katzschmann.
Neuer technologischer Ansatz für Druck von Roboter-Hand
Der Ansatz, den die ETH und Inkbit bei der Roboter-Hand verfolgten, bietet auch einen hohen Durchsatz und ein automatisiertes Verfahren des Multimaterialdrucks mit hoher Skalierbarkeit. Eine Schlüsselrolle kam beim Erfolg der Roboter-Hand den bereits erwähnten langsam aushärtenden Polymeren (Thiolene und Epoxide) zu. Um diese allerdings per 3D-Druck verarbeiten zu können, kommt es auch auf die verwendete Technologie an. Bisher konnten nur schnell aushärtende Polymere im 3D-Druck verarbeitet werden, da eine Vorrichtung Unebenheiten nach der Härtung abschabt und so für Teile in entsprechender Qualität sorgt. Langsam aushärtende Polymere würden eine solche Abschabvorrichtung allerdings verkleben, deshalb lohnt es sich, einen genaueren Blick auf die Technologie zu werfen, die die ETH Zürich bei ihrer Forschung verwendet hat.
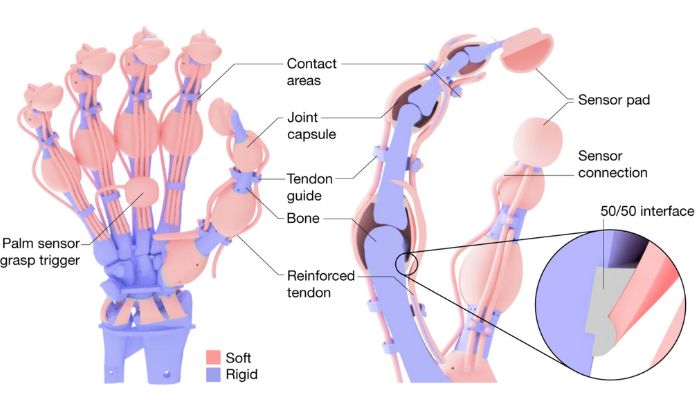
Die 3D-gedruckte Roboter-Hand besteht aus künstlichen Knochen, Sehnen und Bändern aus unterschiedlichen Materialien, darunter auch weiche, elastische Kunststoffe. (Bild: Thomas Buchner et al; Nature)
Es handelt sich dabei um die Vision Controlled Jetting-Technologie des US-Startups Inkbit, ein Spin-off des MIT. Bei dieser Drucktechnologie, einem Inkjet-Verfahren, tragen Düsen an jeder Stelle das gewünschte, dickflüssige Material auf, das durch eine UV-Lampe Schicht für Schicht ausgehärtet wird. Das Besondere an der Technologie ist aber, dass ein 3D-Laserscanner daraufhin die gedruckte Schicht auf Unebenheiten prüft, die dann beim Auftragen der nächsten Schicht berücksichtigt werden. „Ein Feedback-Mechanismus gleicht diese Unebenheiten beim Druck der nächsten Schicht aus, indem er in Echtzeit punktgenau nötige Anpassungen der zu druckenden Materialmengen berechnet“, erklärt Wojciech Matusik, Professor am Massachusetts Institute of Technology (MIT) und Mitautor der Studie. Das heißt, das Scansystem erfasst die 3D-Struktur und ermöglicht über eine digitale Rückkopplungsschleife eine sofortige Anpassung. Das macht mechanische Zusatzlösungen überflüssig und ermöglicht ein durchgehendes berührungsloses Verfahren, in dem kontinuierlich aushärtende Kunststoffe mit unterschiedlicher Elastizität gedruckt werden können. Als Stützstruktur wird Wachs verwendet, das anschließend bei 60°Grad weggeschmolzen wird.
Herausforderungen bestanden für die ETH Zürich und Inkbit bei diesem Forschungs-Projekt darin, dass sich einige gedruckte Teile im Freien verformten. Außerdem kam es vor, dass die Grenzflächen der Multimaterialdrucke nicht immer gut hafteten, was allerdings in Zukunft verbessert werden kann. Die insgesamt hohe Auflösung, der schnelle Druckvorgang und die große Bandbreite an Materialien mit verschiedenen Eigenschaften ermöglichen eine Vielzahl an hybriden weich-starren Robotern und anderen Anwendungen. Die ETH Zürich konnte durch die verschiedenen getesteten Anwendungen die Drucktechnologie von Inkbit für die Verwendung von langsam härtenden Polymeren optimieren und wird sich nun darauf konzentrieren, weitere Möglichkeiten auszuloten und noch komplexere Strukturen für verschiedene Anwendungen auszuprobieren. Inkbit hat es sich zum Ziel gemacht, die Technologie zu kommerzialisieren, sie als Service anzubieten und im nächsten Schritt auch einen Drucker mit dieser Technologie auf den Markt zu bringen. Mehr zur Studie finden Sie HIER.
Was halten Sie von der 3D-gedruckten Roboter-Hand und den Forschungsarbeiten der ETH Zürich? Lassen Sie uns gerne einen Kommentar da, oder teilen Sie es uns auf Facebook oder LinkedIN mit. Möchten Sie außerdem eine Zusammenfassung der wichtigsten Neuigkeiten im 3D-Druck und der additiven Fertigung direkt und bequem in Ihr Postfach erhalten? Dann registrieren Sie sich jetzt für unseren wöchentlichen Newsletter.
*Titelbildnachweis: ETH Zürich, Thomas Buchner