3D-gedruckte Roboterhand identifiziert Gegenstände mit nur einem Griff

Forscher am Massachusetts Institute of Technology (MIT) haben eine 3D-gedruckte Roboterhand entwickelt, welche anhand von Berührungssensoren mit nur einem Greifvorgang ermitteln kann, um welchen Gegenstand es sich handelt. Die Technologie wird vor allem durch den demografischen Wandel zunehmend wichtiger, da solche Roboterhände in der Zukunft für den Einsatz in der Pflege interessant sein könnten. Zwar wurden bereits zahlreiche Roboterhände entwickelt, diese sind aber noch nicht in der Lage Objekte zuverlässig zu identifizieren. Grund hierfür ist, dass sich die funktionsfähigen Sensoren bei den meisten Roboterhänden nur in den Fingerspitzen befinden. Dadurch muss der Gegenstand genau da die Sensoren berühren, was ein mehrmaliges Greifen erforderlich macht. Bei einer anderen Art von bereits existierenden Lösungen werden weniger leistungsstarke Sensoren im ganzen künstlichen Finger integriert. Hierbei werden weniger Informationen durch die Sensoren gesammelt, folglich muss auch bei diesen Modellen mehrmals nach dem Objekt gegriffen werden.
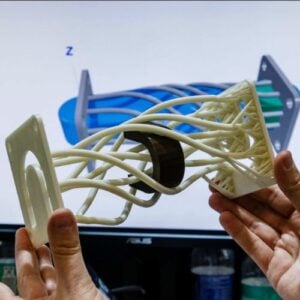
Die Forscher am MIT haben nun einen neuen Lösungsweg gefunden. Im Gegensatz zu bisherigen Roboterhänden, verfügt der neue Prototyp mit drei Fingern über ein robustes 3D-gedrucktes Skelett, welches vorteilhaft ist, um schwere Gegenstände zu greifen. Welche Technologie und welcher 3D-Drucker hierbei verwendet wurde, ist nicht bekannt. Das Skelett ist von einer flexiblen, weichen Schicht umgeben, die nötig ist, damit biegsame Gegenstände vorsichtig gegriffen werden können. Diese stellt sozusagen eine transparente Haut dar, in der hochauflösende Sensoren eingearbeitet sind. Über die gesamte Fingerlänge werden über die Sensoren mithilfe einer Kamera und LEDs eine Vielzahl von visuellen Daten gesammelt.
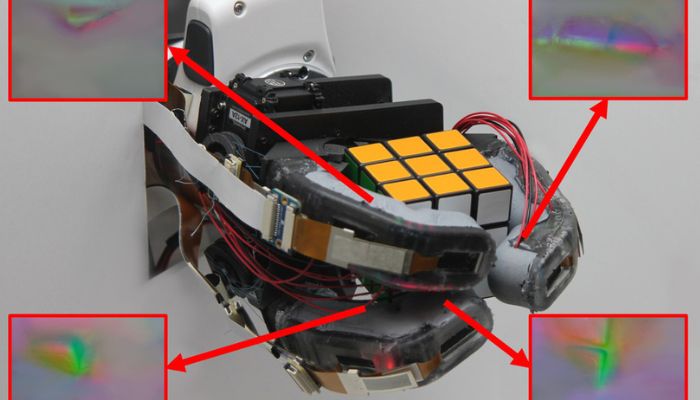
Die Roboterhand verfügt über mehrere leistungsstarke Sensoren (Bild: MIT)
Die Notwendigkeit für eine sowohl starke als auch weiche Hand wird von Sandra Liu, Studentin im Fachbereich Maschinenbau und Mitautorin einer Forschungsarbeit über den Roboterfinger, verdeutlicht: „Es ist sehr wichtig, dass jede Hand sowohl weiche als auch starre Elemente hat, aber auch, dass sie in der Lage ist, einen großen Bereich abzutasten, vor allem, wenn wir sehr komplizierte Manipulationsaufgaben durchführen wollen, wie es unsere eigenen Hände tun können. Unser Ziel bei dieser Arbeit war es, all die Dinge, die unsere menschlichen Hände so gut machen, in einem Roboterfinger zu vereinen, der Aufgaben übernehmen kann, die andere Roboterfinger derzeit nicht bewältigen können“. Das Forschungspapier wurde von Liu und ihrem Kommilitonen Leonardo Zamora Yañez unter Aufsicht ihres Betreuers Edward Adelson verfasst. Auf der RoboSoft-Konferenz werden die Ergebnisse schließlich vorgestellt. Mehr Informationen finden Sie HIER.
Was halten Sie von der 3D-gedruckten Roboterhand? Lassen Sie uns dazu einen Kommentar da, oder teilen Sie es uns auf Facebook oder LinkedIN mit. Möchten Sie außerdem eine Zusammenfassung der wichtigsten Neuigkeiten im 3D-Druck und der additiven Fertigung direkt und bequem in Ihr Postfach erhalten? Dann registrieren Sie sich jetzt für unseren wöchentlichen Newsletter.
*Titelbildnachweis: Robofunktion Systems